机器人可编程系统
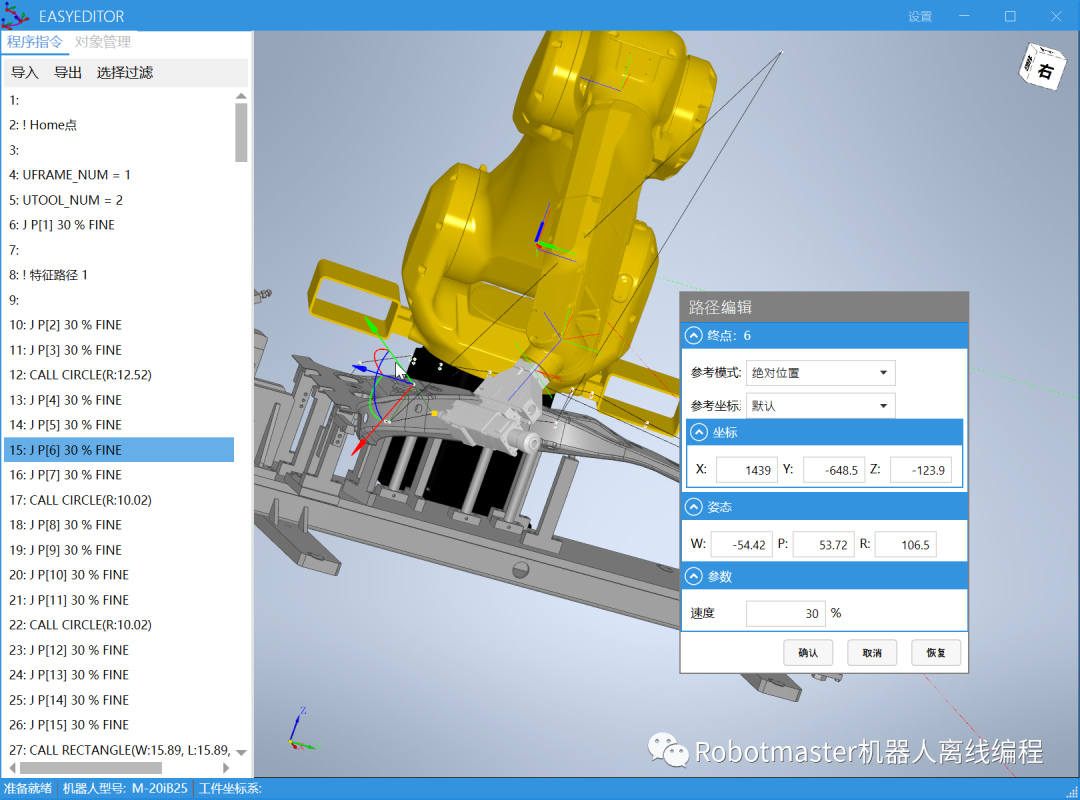
路径编辑
出于两个原因,离线程序在现场可能需要微调:
1)现场误差:来源于设备误差、产品的位置误差、和产品的加工误差。对于首件,离线程序到现场会有差异。
2)批次误差。对于已经调试好的连续生产件,不同批次的产品也可能有细微差异。
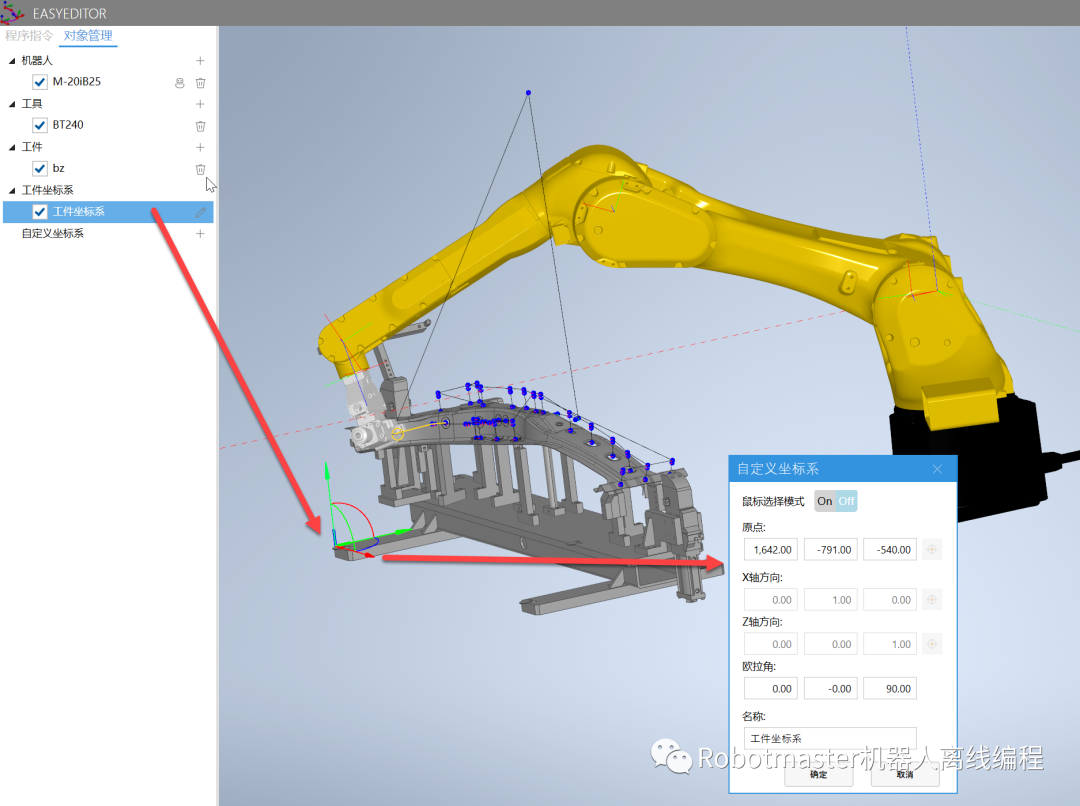
这种微调可能是坐标系的调整,也可能是切割轨迹的调整。在反复的调整过程中,客户希望设备端有一个可视化的界面,方便调整,并可以快速地上传和下发程序。因此,在线编辑模块应运而生。
在线编辑模块支持坐标系调整,单点编辑和多点编辑,也可以对特征图形的参数进行修改。同时,在线编辑还支持碰撞检测和机器人仿真。
编辑后的轨迹,可以直接同步给机器人执行。机器人端如果进行过其它调整(如示教),还可以将机器人程序上传到在线编辑模块里进行比对和调试。
机器人编辑工具
基于AnyCAD AppFramework开发的机器人编辑工具,有进一步开发需求欢迎联系我们。
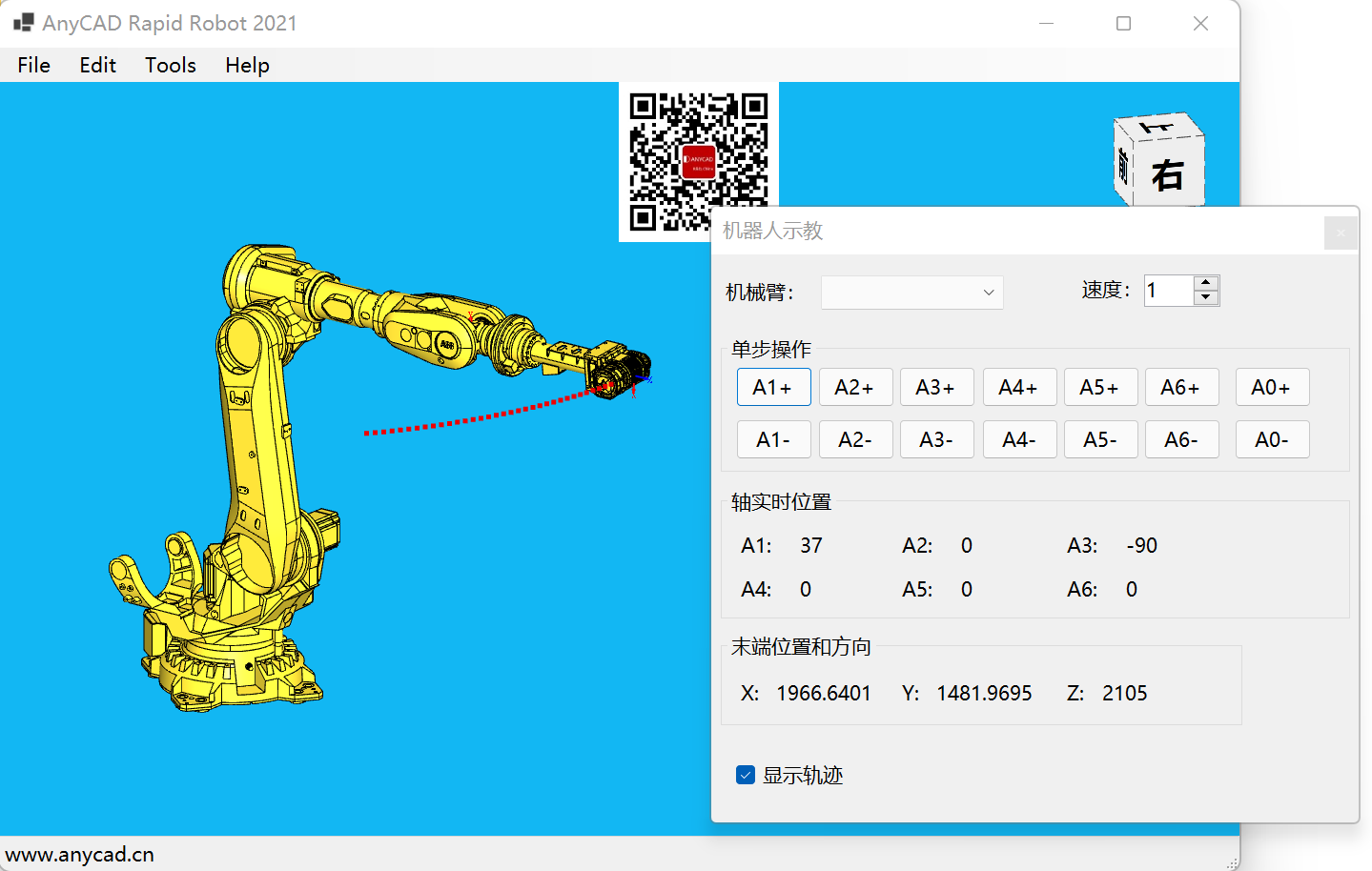
机器人示教器
AnyCAD官方提供的机器人模拟示例程序:源码下载
- 支持多轴机器模拟
- DH参数配置
- 自定义机器人文件
- .NET 6实现
机器人可编程集成环境
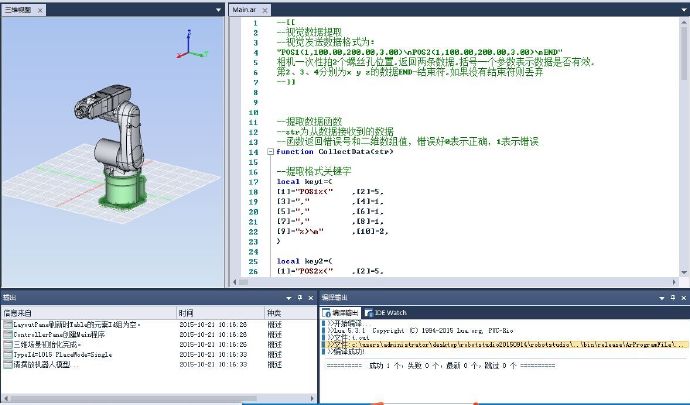
国内某领先的自动化控制系统集成公司基于AnyCAD研发的机器人仿真系统,实现类似ABB Robot Studio的功能。